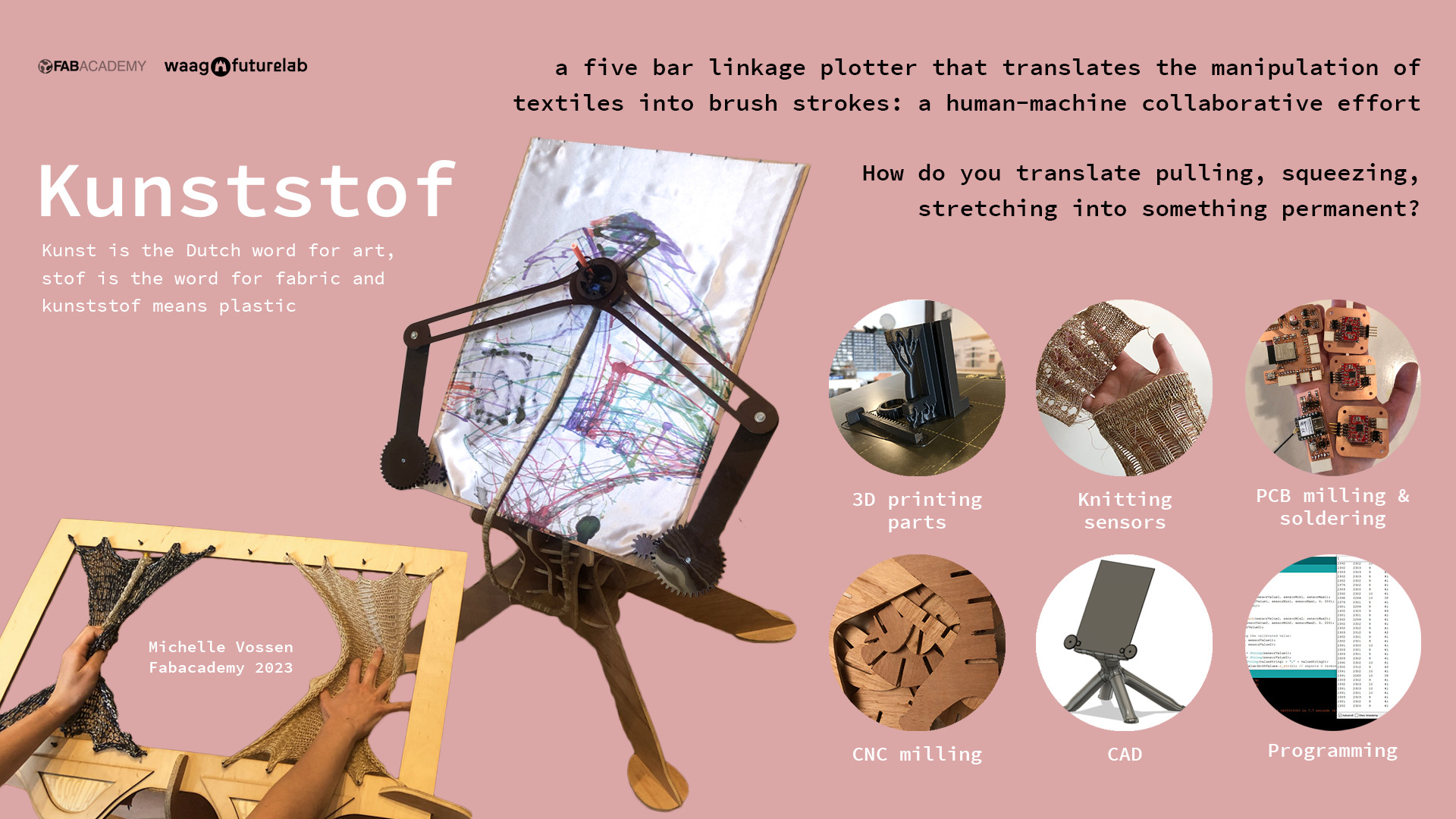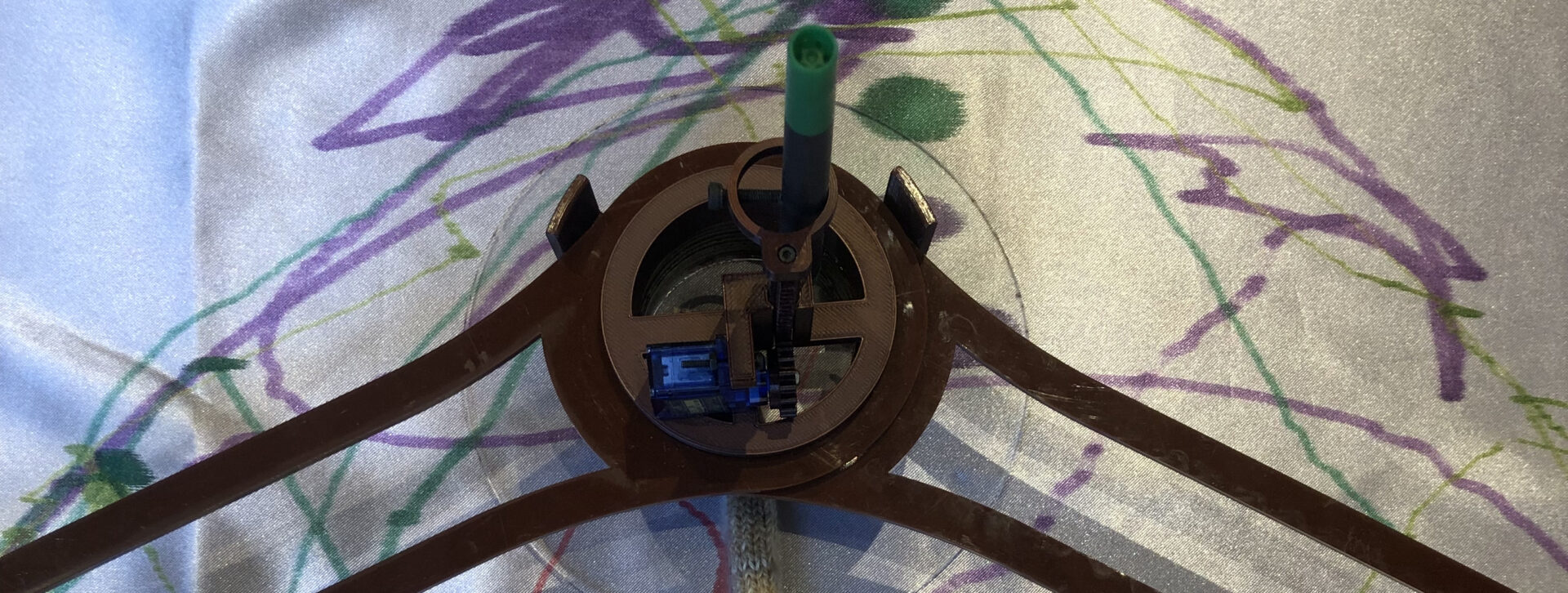
A five bar linkage plotter on an easle that moves based on variable resistance input from knitted sensors on the other easle. The painting robot translates the manipulation of textiles directly into brush strokes. You have to figure out new ways to get the machine to do what you want in a human/machine collaborative effort.
The smaller easle has place for two interchangeable e-textiles sensors. You have to start with calibrating the sensors: press the CALIBRATE button and manipulate the sensors for five seconds. After that the painting robot gets to work, translating the touch of the textiles into an illustration. With the BRUSH button you can toggle the height of the brush, touching or hovering above the canvas.
Final Project Fab Academy 2023